 22/06/15
22/06/15Capturar luz desenfocada supone un reto para obtener imágenes nítidas de alto contraste en muchas aplicaciones de imagen. La microscopía digital de lámina de luz escaneada (DSLM) ofrece una potente manera de reducir la captura de luz desenfocada mediante la sincronización de la iluminación con el obturador giratorio de las cámaras CMOS modernas. Sin embargo, esta sincronización precisa requiere un control total sobre el funcionamiento del obturador giratorio de la cámara, una función que ofrecen las cámaras Tucsen con modo de control de obturador giratorio.
¿Qué es una persiana enrollable?
El obturador es la parte de la cámara que inicia y detiene la exposición a la luz. Anteriormente, las cámaras científicas utilizaban obturadores mecánicos que se abrían para exponer una imagen y se cerraban para finalizar la exposición. Los obturadores mecánicos eran lentos y presentaban problemas de fiabilidad con el uso prolongado. Ahora, las cámaras científicas utilizan obturadores electrónicos, que son significativamente más rápidos, sencillos y versátiles.
Las cámaras de obturador rotatorio comienzan su adquisición en la parte superior del sensor y avanzan línea por línea hasta la parte inferior. Esta adquisición implica tres procesos: restablecimiento de la señal, exposición a la luz y lectura.
La exposición de cada fila comienza restableciendo la señal adquirida de cada píxel. Una vez transcurrido el tiempo de exposición designado para la fila superior, la lectura, que marca el final de la adquisición, se reduce de la misma manera. Esto deja un área de píxeles activos que se extiende de arriba a abajo de la cámara, cuya altura está determinada por el tiempo de exposición. Con la cámara funcionando a máxima velocidad, el retardo por línea suele ser de entre 5 y 25 microsegundos por línea de píxeles, dependiendo de la velocidad de la cámara.
Para aprovechar las técnicas ópticas que requieren la sincronización del escaneo de la iluminación y el obturador de la cámara, este retardo suele ser demasiado corto, lo que significa que el obturador funciona demasiado rápido como para que el resto del hardware pueda seguirle el ritmo. Aquí es donde entra en juego el modo de control del obturador.
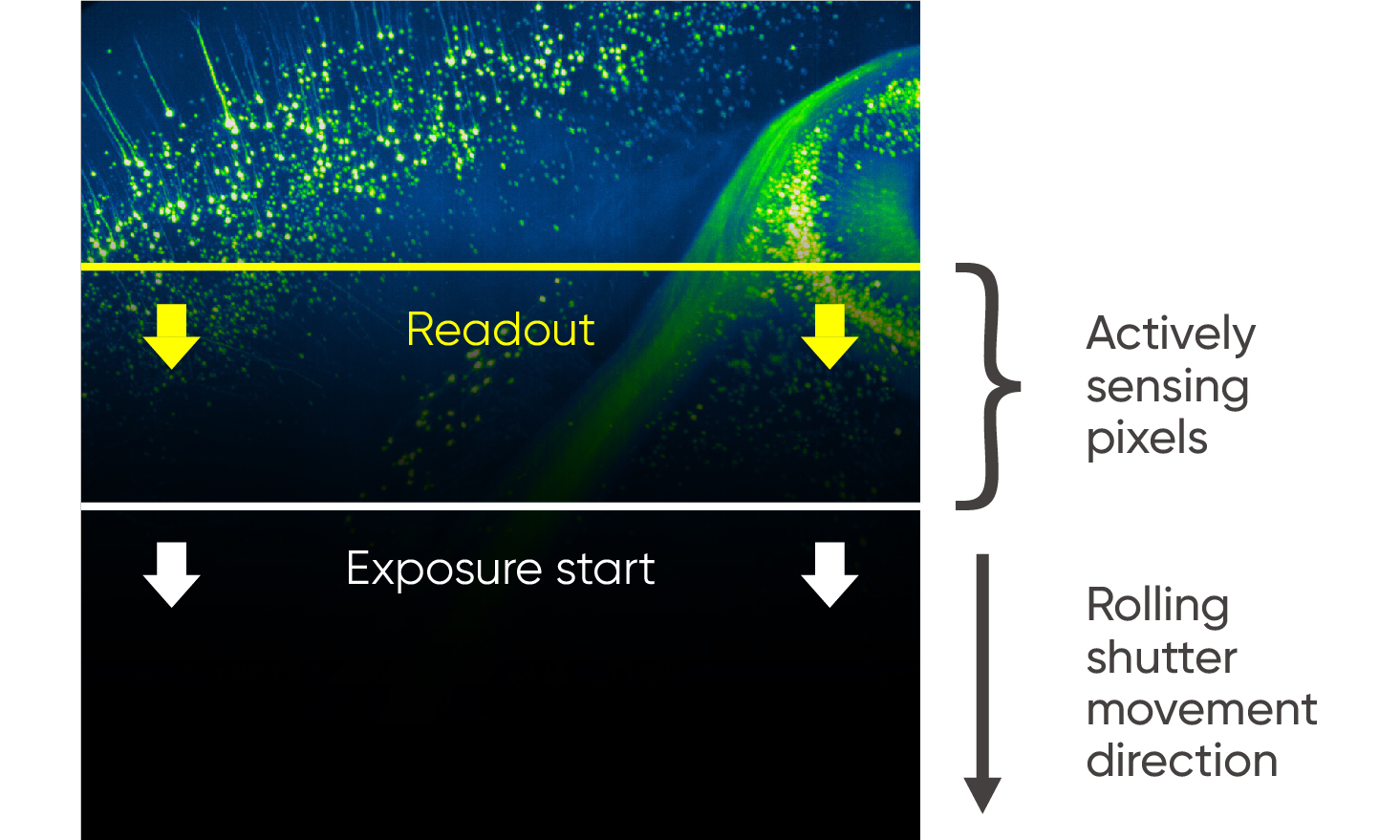
Figura 1: Diagrama esquemático del funcionamiento de la persiana enrollable
Cómo funciona el modo de control de persianas enrollables
Gracias a la inteligencia integrada en las cámaras Tucsen, el funcionamiento del obturador giratorio se puede ajustar con precisión para sincronizarlo con hardware externo. Al añadir un pequeño retardo adicional entre el reinicio y la lectura de cada línea, se puede controlar el tiempo que tarda el área activa del píxel en recorrer el sensor para permitir esta sincronización.
Además, se puede ajustar con precisión la altura de la rendija del área activa escaneada. Tiempos de exposición más largos o retardos de línea más cortos resultan en una mayor altura de la rendija. En el caso de DSLM, esto se puede utilizar para ajustar únicamente el área iluminada de la muestra, logrando un equilibrio entre la exposición de los píxeles durante el máximo tiempo posible para una captura de señal eficaz y la minimización de la luz desenfocada.
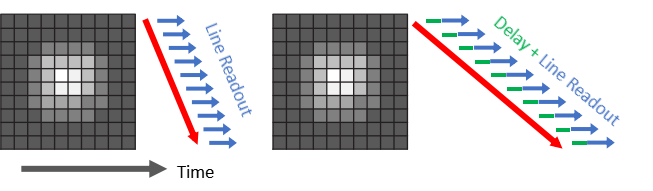
Cifra2Izquierda: Esquema del funcionamiento del obturador rodante a máxima velocidad de la cámara. Derecha: Esquema que muestra la velocidad del obturador rodante con el modo de control del obturador rodante, que añade un retardo adicional entre cada línea para permitir la sincronización con otro hardware.
Con este retraso opcional, ahora hay tres variables importantes a entender que determinan el funcionamiento del obturador rodante, indicando la altura del área de píxeles 'activos', y qué tan rápido atraviesa el sensor.
Tiempo de líneaEste es el tiempo predeterminado que el sensor tarda en leer una fila y pasar a la siguiente. Determina la velocidad nativa del sensor de la cámara y puede especificarse en el software de la cámara o aproximarse para una región de interés (ROI) y un modo de cámara determinados mediante:

Donde "Velocidad máxima de cuadros de la cámara" se refiere a la velocidad de cuadros cuando no está limitada ni por la duración del tiempo de exposición ni por la frecuencia de disparo externa.
Tiempo de exposición:Esto determina durante cuánto tiempo está activa cada fila de píxeles, determinando así la altura del área activa para un tiempo de línea y un tiempo de retraso determinados.
Retardo de tiempo de línea:Este es el retardo adicional que se agrega con el modo de control de persiana enrollable. El modo de control de persiana enrollable permite agregar retardo.en múltiplos enteros de la línea de tiempo. Por ejemplo, si el tiempo de línea de una cámara es de 10 microsegundos, se requiere un retraso adicional por línea de 1, 2,…Se pueden agregar hasta 8.928, indicando el número de múltiplos de 10 microsegundos.
También es importante la altura de la región de interés (ROI) utilizada, ya que esto determinará la cantidad de líneas que el área activa debe barrer antes de restablecerse.
Modos de sincronización del modo de control de persianas enrollables
Hay dos modos de funcionamiento para el modo de control de persianas enrollables, dependiendo de qué variable sea más importante controlar.
In Modo de retardo de tiempo de líneaPuede configurar el tiempo de retardo como se especificó anteriormente. El software puede indicar, para el tiempo de exposición especificado, la altura de rendija resultante (la altura de los píxeles activos en el obturador rodante).
In Altura de píxel activo/rendijaEn el modo, puede configurar el número de filas del sensor que desea que estén activas durante el barrido del obturador. El tiempo de exposición especificado se utilizará para calcular el retardo de línea necesario para obtener automáticamente esta altura de ranura.
Configuración del modo de control de persianas enrollables en el software
Controles del modo operativo (estado)
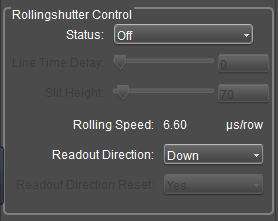
Figura 3: Interfaz de ejemplo para controlar el modo de control de persianas desde el software Tucsen Mosaic. Todas las opciones. disponible a través de Micro-Manager y SDK.
Hay tres estados (modos operativos) disponibles:Off, Retardo de tiempo de línea, Altura de la ranura.
• Cuando se establece enApagado, el sensor se comporta de manera normal sin ningún retraso adicional.
• Cuando se establece enRetardo de tiempo de líneamodo, puede especificar el retraso de tiempo de línea en unidades de tiempo de línea, como se explicó anteriormente.
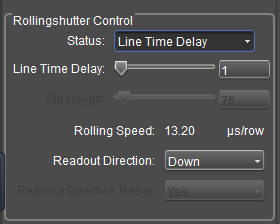
Figura 4: Opciones de software de retardo de línea. EjemploInterfaz del software Tucsen Mosaic. Todas las opciones están disponibles a través de Micro-Manager y SDK.
El número de ciclos de tiempo de línea que se pueden añadir al retardo configurable varía según la cámara. El nuevo tiempo de línea de la cámara, tras añadir el retardo, es:
Tiempo de intervalo de línea = Tiempo de línea(sensor)+(Tiempo de línea(sensor)× Retardo de tiempo de línea)
El valor del parámetro deVelocidad de rodaduraes igual aTiempo de intervalo de línea.
El tiempo total de lectura de la imagen es entonces:
RcabezaTiempo fuera(imagen)= Tiempo de intervalo de línea×Nfilas.
NfilasEs el número total de filas de píxeles de imagen en la región de interés. La velocidad de fotogramas al capturar imágenes en este modo depende del número de líneas a capturar y del tiempo de ciclo de línea:
Velocidad de fotogramas = 1/(Tiempo de lectura)(imagen)+ Tiempo de exposición)
•Cuando se establece enAltura de la ranura moda, puedes configurar eltamaño del área activa escaneada, dada por tel número de filas de píxeles entre la señal de "reinicio" y la señal de "lectura".El rango de altura de la ranura es de 1 a 2048 píxeles. Para convertirlo a un tamaño físico, multiplique este valor por el tamaño de píxel indicado en la hoja de especificaciones de la cámara.
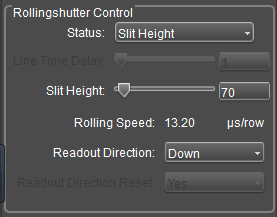
Figura 5: Opciones de control del modo de altura de corte. EjemploInterfaz del software Tucsen Mosaic. Todas las opciones están disponibles a través de Micro-Manager y SDK.
El software calculará automáticamente el retardo de tiempo de línea y el tiempo de intervalo de línea requeridos, la fórmula es la siguiente:
Retardo de tiempo de línea = Tiempo de exposición(Pauta)/ Altura de la ranura(Pauta)
En el modo de alta velocidad (modo de ganancia de la cámara), el rango de altura de rendija solo se puede configurar en un número par, ya que en ese modo las líneas se leen de dos en dos. Los parámetros en el modo de alta velocidad se calculan de la siguiente manera.
Retardo de tiempo de línea = Tiempo de exposición(Pauta)/ ½Altura de la ranura(Pauta)
Altura de la ranura = (Tiempo de exposición(Pauta)÷ Retardo de tiempo de línea)×2
Controles de dirección de escaneo
Hay tres opciones para la dirección de la persiana enrollable:
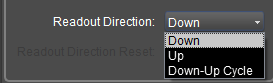
DpropioLa dirección de escaneo descendente es la predeterminada para las cámaras sCMOS. El obturador rotatorio comienza desde la primera fila en la parte superior del sensor y escanea hacia abajo hasta la última fila en la parte inferior. Cada captura de fotograma posterior comienza con la primera fila en la parte superior.
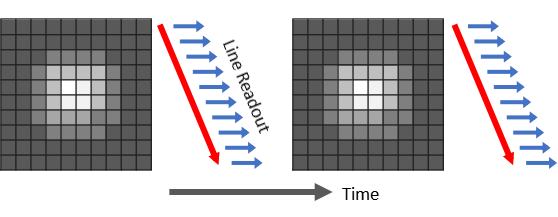
Figura 6: Esquema del modo de escaneo descendente
Up:En el modo de escaneo ascendente, el obturador rotatorio comienza desde la fila inferior y escanea hasta la fila superior de la primera fila. Cada captura de fotograma subsiguiente comienza desde la fila inferior. Aunque el orden de captura de datos en la cámara ahora está invertido, la imagen resultante enviada al software aún mostrará la orientación original; es decir, la imagen no se invertirá verticalmente con respecto al modo de escaneo descendente.
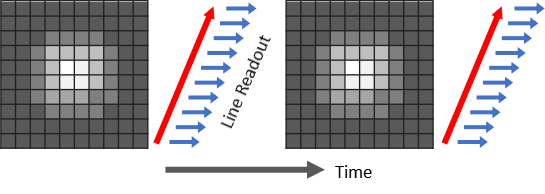
Figura 7: Esquema del modo de escaneo ascendente
Ciclo de subida y bajadaAl escanear alternativamente hacia arriba y hacia abajo, el obturador rotatorio comienza desde la primera fila superior y baja hasta la última fila inferior. Para el siguiente fotograma, el obturador rotatorio comienza en la fila inferior y escanea hacia arriba hasta la fila superior, y así sucesivamente. La orientación de la imagen adquirida en este modo es la misma que la orientación de escaneo hacia abajo.

Figura 8: Esquema del modo de escaneo de ciclo descendente-ascendente
• ReaReinicio de dirección de la duda
Esta función sólo está disponible en el modo de ciclo ascendente-descendente.
La configuración predeterminada para este parámetro es "Sí", lo que garantiza que el primer fotograma de cada nueva secuencia de adquisición comenzará en la fila superior y escaneará hacia abajo.
Cuando este parámetro se establece en "No", el primer fotograma de cada nueva adquisición comenzará en la posición del último fotograma de la secuencia anterior. Si el último fotograma termina en la fila inferior, el primer fotograma de las adquisiciones posteriores comenzará en la fila inferior y se propagará hacia arriba.











