 25/09/11
25/09/11En cualquier sistema de medición, desde la comunicación inalámbrica hasta la fotografía digital, la relación señal-ruido (SNR) es un parámetro fundamental de calidad. Ya sea que esté analizando imágenes de telescopios, mejorando grabaciones de micrófonos o solucionando problemas en una conexión inalámbrica, la SNR le indica cuánta información útil se distingue del ruido de fondo no deseado.
Sin embargo, calcular correctamente la relación señal-ruido (SNR) no siempre es sencillo. Dependiendo del sistema, puede que sea necesario considerar factores adicionales como la corriente oscura, el ruido de lectura o el agrupamiento de píxeles. Esta guía le explica la teoría, las fórmulas básicas, los errores comunes, las aplicaciones y las formas prácticas de mejorar la relación señal-ruido (SNR), asegurándose de que pueda aplicarla con precisión en una amplia gama de contextos.
¿Qué es la relación señal-ruido (SNR)?
En esencia, la relación señal-ruido mide la relación entre la intensidad de una señal deseada y el ruido de fondo que la oscurece.
● Señal = la información significativa (por ejemplo, una voz en una llamada, una estrella en la imagen de un telescopio).
● Ruido = fluctuaciones aleatorias no deseadas que distorsionan u ocultan la señal (por ejemplo, estática, ruido del sensor, interferencia eléctrica).
Matemáticamente, la relación señal-ruido (SNR) se define como:

Debido a que estas relaciones pueden variar en muchos órdenes de magnitud, la relación señal-ruido (SNR) generalmente se expresa en decibelios (dB):
● Alta relación señal-ruido (por ejemplo, 40 dB): la señal predomina, lo que genera información clara y confiable.
● Relación señal-ruido baja (por ejemplo, 5 dB): el ruido abruma la señal, lo que dificulta la interpretación.
Cómo calcular la relación señal-ruido (SNR)
El cálculo de la relación señal-ruido puede realizarse con distintos niveles de precisión según las fuentes de ruido incluidas. En esta sección, se presentarán dos métodos: uno que considera la corriente oscura y otro que la asume como despreciable.
Nota: Para sumar valores de ruido independientes, es necesario sumarlos en cuadratura. Cada fuente de ruido se eleva al cuadrado, se suma y se obtiene la raíz cuadrada del total.
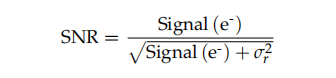
Relación señal-ruido con corriente oscura
La siguiente es la ecuación a utilizar en situaciones donde el ruido de la corriente oscura es lo suficientemente grande como para requerir su inclusión:

Aquí está la definición de los términos:
Señal (e-): Esta es la señal de interés en los fotoelectrones, con la señal de corriente oscura restada

La señal total (e-) será el recuento de fotoelectrones en el píxel de interés, no el valor del píxel en unidades de niveles de gris. La segunda instancia de la señal (e-), en la parte inferior de la ecuación, es el ruido de disparo de fotones.
Corriente oscura (CC):El valor actual oscuro para ese píxel.
t: Tiempo de exposición en segundos
σr:Leer ruido en modo cámara.
Relación señal-ruido para corriente oscura despreciable
En los casos de corto (< 1 segundo) de tiempos de exposición, además de cámaras refrigeradas de alto rendimiento, el ruido de corriente oscura generalmente estará muy por debajo del ruido de lectura y se ignorará de manera segura.
Donde los términos son nuevamente como se definieron anteriormente, con la excepción de que no es necesario calcular la señal de corriente oscura ni restarla de la señal, ya que debe ser igual a cero.
Limitaciones de estas fórmulas y términos faltantes
Las fórmulas opuestas sólo proporcionarán respuestas correctas para CCD yCámaras CMOSEl EMCCD y los dispositivos intensificados introducen fuentes de ruido adicionales, por lo que estas ecuaciones no pueden utilizarse. Para una ecuación de relación señal-ruido más completa que tenga en cuenta estas y otras contribuciones.
Otro término de ruido que se incluye (o solía incluirse) comúnmente en las ecuaciones de SNR es la no uniformidad de la fotorrespuesta (PRNU), también denominada a veces «ruido de patrón fijo» (FPN). Esta representa la desigualdad de la ganancia y de la respuesta de la señal a lo largo del sensor, que puede volverse dominante con señales altas si es suficientemente grande, reduciendo la SNR.
Si bien las primeras cámaras tenían un PRNU lo suficientemente significativo como para requerir su inclusión, la mayoría de las modernascámaras científicasTienen un PRNU lo suficientemente bajo como para que su contribución sea muy inferior a la del ruido de disparo de fotones, especialmente tras aplicar las correcciones internas. Por lo tanto, actualmente se suele omitir en los cálculos de relación señal-ruido (SNR). Sin embargo, el PRNU sigue siendo importante para algunas cámaras y aplicaciones, y se incluye en la ecuación de relación señal-ruido (SNR) más avanzada para mayor integridad. Esto significa que las ecuaciones proporcionadas son útiles para la mayoría de los sistemas CCD/CMOS, pero no deben considerarse de aplicación universal.
Tipos de ruido en los cálculos de SNR
Calcular la relación señal-ruido (SNR) no consiste simplemente en comparar una señal con un único valor de ruido. En la práctica, intervienen múltiples fuentes de ruido independientes, y comprenderlas es esencial.
Ruido de disparo
● Origen: llegada estadística de fotones o electrones.
● Escala con la raíz cuadrada de la señal.
● Dominante en imágenes limitadas por fotones (astronomía, microscopía de fluorescencia).
Ruido térmico
● También se denomina ruido Johnson-Nyquist y se produce por el movimiento de los electrones en resistencias.
● Aumenta con la temperatura y el ancho de banda.
● Importante en electrónica y comunicación inalámbrica.
Ruido de corriente oscura
● Variación aleatoria de la corriente oscura dentro de los sensores.
● Más significativo en exposiciones prolongadas o detectores cálidos.
● Reducido al enfriar el sensor.
Leer ruido
● Ruido de amplificadores y conversión de analógico a digital.
● Fijo por lectura, por lo que es crítico en regímenes de baja señal.
Ruido de cuantificación
● Introducido por digitalización (redondeo a niveles discretos).
● Importante en sistemas de baja profundidad de bits (por ejemplo, audio de 8 bits).
Ruido ambiental/del sistema
● EMI, diafonía, ondulación de la fuente de alimentación.
● Puede dominar si el blindaje/conexión a tierra es deficiente.
Comprender cuál de estos es dominante ayuda a elegir la fórmula y el método de mitigación adecuados.
Errores comunes en el cálculo de la relación señal-ruido (SNR)
Es fácil encontrar muchos métodos abreviados para estimar la relación señal-ruido en imágenes. Estos suelen ser menos complejos que las ecuaciones opuestas, permiten una derivación más sencilla a partir de la propia imagen en lugar de requerir el conocimiento de parámetros de la cámara como el ruido de lectura, o ambas cosas. Desafortunadamente, es probable que cada uno de estos métodos sea incorrecto y genere resultados sesgados e inútiles. Se recomienda encarecidamente utilizar las ecuaciones opuestas (o la versión avanzada) en todos los casos.
Algunos de los atajos falsos más comunes incluyen:
1. Comparación de la intensidad de la señal con la intensidad del fondo, en niveles de gris. Este enfoque intenta evaluar la sensibilidad de la cámara, la intensidad de la señal o la relación señal/ruido comparando la intensidad máxima con la intensidad del fondo. Este enfoque presenta graves deficiencias, ya que la influencia del desplazamiento de la cámara puede determinar arbitrariamente la intensidad del fondo, la ganancia puede determinar arbitrariamente la intensidad de la señal y no se considera la contribución del ruido ni en la señal ni en el fondo.
2. Dividir los picos de la señal por la desviación estándar de un área de píxeles de fondo. O bien, comparar los valores de los picos con el ruido visual de fondo revelado por un perfil de línea. Suponiendo que la desviación se resta correctamente de los valores antes de la división, el mayor riesgo de este método es la presencia de luz de fondo. Cualquier luz de fondo suele predominar sobre el ruido en los píxeles de fondo. Además, el ruido en la señal de interés, como el ruido de disparo, no se considera en absoluto.
3. Señal media en píxeles de interés vs. desviación estándar de los valores de píxel: Comparar u observar cuánto cambia una señal pico en píxeles vecinos o fotogramas sucesivos es más preciso que otros métodos abreviados, pero es poco probable que evite otras influencias que distorsionan los valores, como un cambio en la señal no derivado del ruido. Este método también puede ser impreciso debido a un bajo número de píxeles en la comparación. No se debe olvidar la resta del valor de desplazamiento.
4. Cálculo de la relación señal/ruido (SNR) sin convertir a unidades de intensidad de fotoelectrones o sin eliminar el desplazamiento: como el ruido de disparo de fotones suele ser la fuente de ruido más grande y depende del conocimiento del desplazamiento y la ganancia de la cámara para la medición, no es posible evitar el cálculo de nuevo a fotoelectrones para los cálculos de la relación señal/ruido (SNR).
5. Evaluación visual de la relación señal-ruido (SNR): Si bien en algunas circunstancias evaluar o comparar la relación señal-ruido (SNR) visualmente puede ser útil, también existen inconvenientes inesperados. Evaluar la relación señal-ruido (SNR) en píxeles de alto valor puede ser más difícil que en píxeles de bajo valor o de fondo. Efectos más sutiles también pueden influir: por ejemplo, diferentes monitores de computadora pueden mostrar imágenes con contrastes muy diferentes. Además, mostrar imágenes con diferentes niveles de zoom en el software puede influir significativamente en la apariencia visual del ruido. Esto es especialmente problemático al intentar comparar cámaras con diferentes tamaños de píxeles en el espacio del objeto. Finalmente, la presencia de luz de fondo puede invalidar cualquier intento de evaluar visualmente la relación señal-ruido (SNR).
Aplicaciones de la relación señal-ruido (SNR)
SNR es una métrica universal con amplias aplicaciones:
● Grabación de audio y música: determina la claridad, el rango dinámico y la fidelidad de las grabaciones.
● Comunicación inalámbrica: la relación señal-ruido (SNR) se relaciona directamente con las tasas de error de bits (BER) y el rendimiento de los datos.
● Imágenes científicas: en astronomía, detectar estrellas tenues contra el resplandor del cielo de fondo requiere una relación señal-ruido (SNR) alta.
● Equipo médico: los ECG, las resonancias magnéticas y las tomografías computarizadas dependen de una relación señal-ruido (SNR) alta para distinguir las señales del ruido fisiológico.
● Cámaras y fotografía: Tanto las cámaras de consumo como los sensores CMOS científicos utilizan la relación señal/ruido (SNR) para evaluar el rendimiento en condiciones de poca luz.
Mejorando la relación señal-ruido (SNR)
Dado que la relación señal-ruido (SNR) es una medida tan crucial, se dedica un esfuerzo considerable a mejorarla. Las estrategias incluyen:
Enfoques de hardware
● Utilice mejores sensores con menor corriente oscura.
● Aplicar blindaje y conexión a tierra para reducir la EMI.
● Detectores de frío para suprimir el ruido térmico.
Enfoques de software
● Aplicar filtros digitales para eliminar frecuencias no deseadas.
● Utilice el promedio en varios cuadros.
● Emplear algoritmos de reducción de ruido en el procesamiento de imágenes o audio.
Binning de píxeles y su efecto en la relación señal/ruido (SNR)
El efecto del binning en la relación señal-ruido depende de la tecnología de la cámara y del comportamiento del sensor, ya que el rendimiento del ruido de las cámaras binning y no binning puede variar significativamente.
Las cámaras CCD pueden sumar la carga de los píxeles adyacentes en el chip. El ruido de lectura solo se produce una vez, aunque también se suma la señal de corriente oscura de cada píxel.
La mayoría de las cámaras CMOS realizan binning fuera del chip, lo que significa que primero se miden los valores (y se introduce el ruido de lectura) y luego se suman digitalmente. El ruido de lectura para estas sumas aumenta al multiplicarse por la raíz cuadrada del número de píxeles sumados, es decir, por un factor de 2 para el binning 2x2.
Como el comportamiento del ruido de los sensores puede ser complicado, para aplicaciones cuantitativas es recomendable medir el desplazamiento, la ganancia y el ruido de lectura de la cámara en modo agrupado y utilizar estos valores para la ecuación de relación señal-ruido.
Conclusión
La relación señal-ruido (SNR) es una de las métricas más importantes en ciencia, ingeniería y tecnología. Desde definir la claridad en las llamadas telefónicas hasta permitir la detección de galaxias distantes, la SNR sustenta la calidad de los sistemas de medición y comunicación. Dominar la SNR no se trata solo de memorizar fórmulas, sino de comprender supuestos, limitaciones y compensaciones en el mundo real. Desde esta perspectiva, ingenieros e investigadores pueden realizar mediciones más fiables y diseñar sistemas que extraigan información significativa incluso en condiciones de ruido.
¿Quieres saber más? Consulta los artículos relacionados:
Tucsen Photonics Co., Ltd. Todos los derechos reservados. Al citar, por favor, cite la fuente.www.tucsen.com








